I'm a PhD student in Mechanical Engineering (Robotics) at Washington State University, conducting research in the SIAS Lab, under the supervision of Dr. Mehdi Hosseinzadeh.
My research lies at the intersection of robot perception, computer vision, and human–robot interaction. My work focuses on enabling intelligent robotic systems to reason about human behavior, perceptual awareness, and intent through multimodal sensing and learning-based methods. I am particularly interested in integrating vision–language models, probabilistic reasoning, and motion planning to support robust mobile robot navigation and decision-making in complex, cluttered environments, enabling safe, adaptive, and socially-aware robot behavior in human-centered settings. </tr> </table> ---Education Washington State University (WSU)
PhD in Mechanical Engineering | 2025 – Present | Iran University of Science and Technology (IUST)
Master of Science in Mechanical Engineering | 2020 – 2023 | Amirkabir University of Technology (AUT)
Bachelor of Science in Mechanical Engineering | 2015 – 2020 | ResearchSafe Robot Action Planning under Human Behavioral Uncertainty with Probabilistic and Vision–Language Reasoning
K, Yazdipaz, M. Amiri, M. Hosseinzadeh
Submitted to Advanced Intelligent Systems (under review), 2026
[video]
The proposed action planner update the robot’s belief about human cooperation by fusing two latent attributes: Perceptual Awareness (inferred from head pose and gestures) and Navigational Responsiveness (inferred from trajectory adaptations). The framework dynamically weights these attributes based on the interaction phase to address behavioral uncertainty. |  Experimental data; CASE I: Aware/Responsive, CASE II: Unaware/unresponsive, CASE III: Aware/unresponsive,CASE IV: Initially Unaware/Responsive. |
Action Planning for Autonomous Vehicles with Hierarchical Reasoning in Adversarial Traffic Interactions
M. Amiri, K, Yazdipaz, M. Hosseinzadeh
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Under Review), 2026
[video]
The proposed method addresses the challenge of autonomous vehicle (AV) navigation in adversarial scenarios where Human-Driven Vehicles (HDVs) may exhibit non-cooperative or unaware behaviors, such as forced cut-ins and right-of-way violations. We propose a game-theoretic planner based on the Level-k reasoning framework to distinguish between adversarial agents (Level-0) and strategically aware agents (Level-1). By incorporating behavior-driven danger signaling and a recursive Bayesian belief update, the AV can dynamically adapt its trajectory and signaling strategy to ensure safety and efficiency in complex, non-cooperative road interactions. |  Experimental data; Case a/b/c.3: Awareness Update. |
Autonomous Ground Navigation in Highly Constrained Spaces: Lessons Learned From the Fourth BARN Challenge at ICRA 2025
X. Xiao, Z. Xu, S. A. Ghani, A. Datar, D. Song, P. Stone, A. Mazen, K. Yazdipaz, I. Mateyaunga, M. Faied, M. Krishnan, Y. Lu, T. Xu, N. Mohammad, W. Kim, J. Reasoner, R. Chandra, N. Bezzo
IEEE Robotics & Automation Magazine, 2026
[paper] [code]
In the Fourth BARN Challenge at ICRA 2025, our team, the Robotics and Remote Sensing Lab (RRSL), secured first place in the physical competition. We achieved this by successfully completing the most trials (7 out of 9), including finishing all five back-to-back trials in the first obstacle course without needing any fine-tuning. Our winning approach utilized a novel fuzzy-based navigation algorithm termed the Search-Smooth-Safeguard Fuzzy Inference System Vector Field Histogram (S3-FISVFH). This framework enhances standard FISVFH by systematically optimizing fuzzy parameters and integrating three critical components: a lookahead Search mechanism to foresee and avoid local traps, a temporal Smooth filter to mitigate oscillatory behavior, and a Safeguard protocol that uses a "safety bubble" to issue emergency stop and reverse commands when facing imminent collisions. |  S³-FISVFH algorithm evaluating possible paths to avoid traps and dynamic obstacles. |
Robust and Efficient Phase Estimation in Legged Robots via Signal Imaging and Deep Neural Networks
K. Yazdipaz, N. Kohli, S.A. Golestaneh, M. Shahbazi
IEEE Access, 2025
[paper]
A robust and real-time method for phase estimation in legged robots is proposed using signal imaging and lightweight deep neural networks. Time-series data from IMUs and joint encoders are transformed into informative phase images through techniques such as stacked channel imaging and recurrence plots, enabling accurate detection of stance and flight phases without relying on fragile force sensors. | 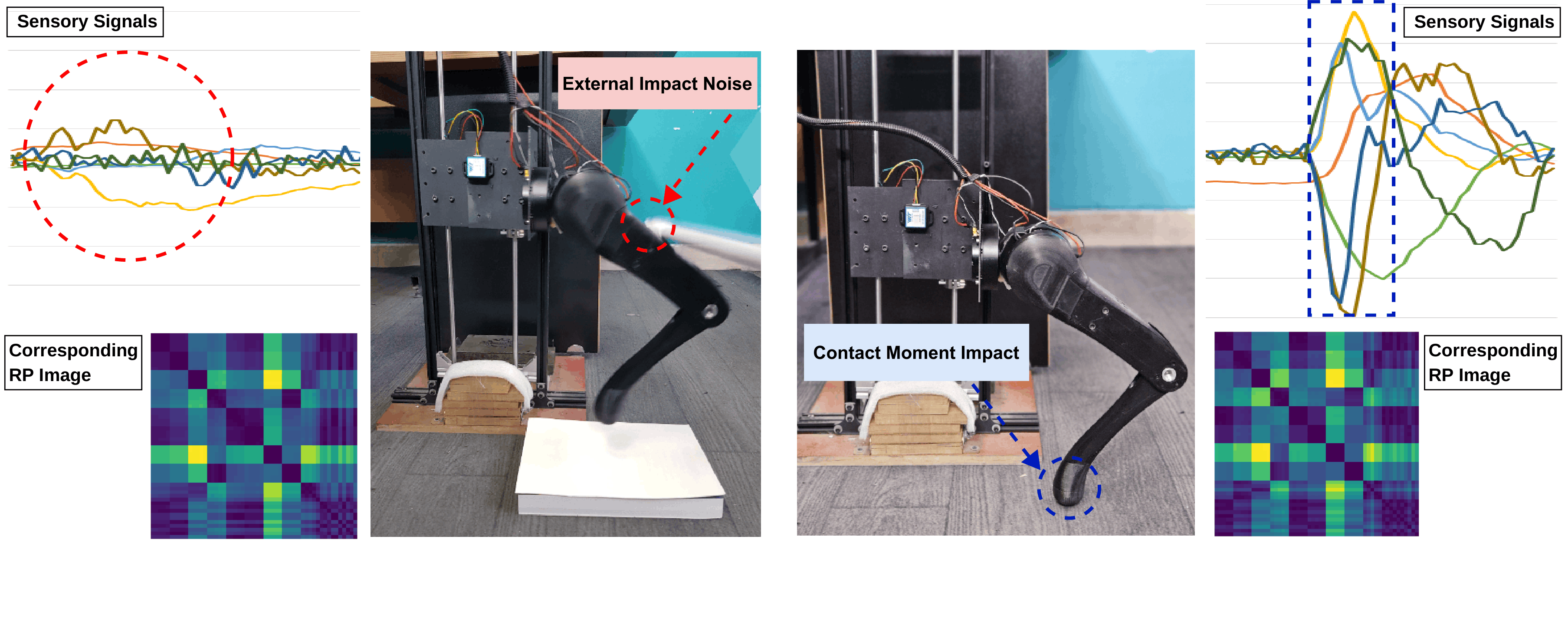 Phase estimation results: transforming IMU and encoder signals into image representations for deep learning-based gait classification. |
|
